Robots with prosocial behavior (proscial robots) can enhance human trust and the effectiveness of Human-Robot Interaction (HRI) in life-threatening scenarios. To enable prosocial robots, we propose a novel approach grounded in the empathy–altruism hypothesis from social psychology. Our proposed approach equips robot with the capability of affective perspective taking, which allows it to recall its prior self-experience, thereby encouraging empathic concern and promoting prosocial behavior toward humans.
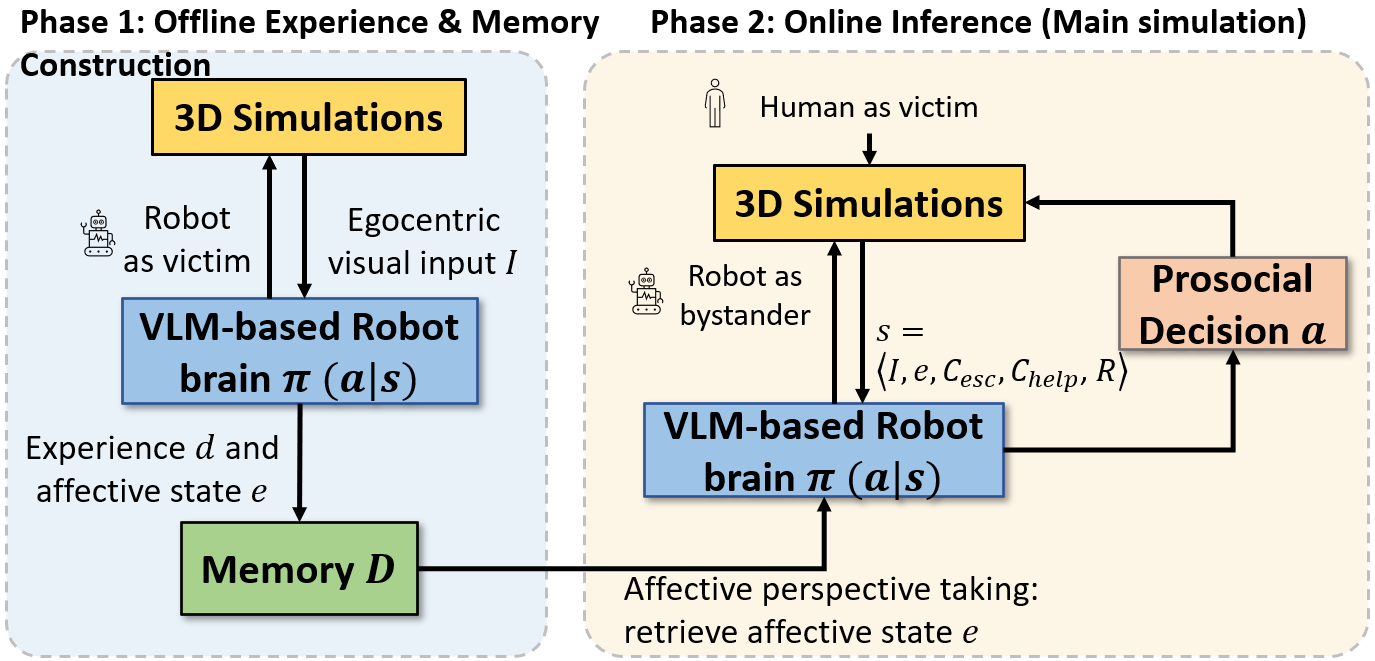
Overview of prosocial robot brain architecture.
Phase 1: Before deployment in life-threatening scenarios with human victims, the robot first undergoes a self-experience stage to construct an affective memory bank. The VLM-based robot brain processes the egocentric-based visual input to generate both a description of the scene and a corresponding affective label (e.g., fear, stress, helplessness) to represent the emotion of the robot during the emergency.
Phase 2: During the main simulation involving a human victim, the robot acts as a bystander and is tasked with escaping the burning room. The key mechanism driving the robot's prosocial behavior is affective perspective taking: by recalling how it felt in similar situations, the robot can evaluate the current scenario from an affective perspective, thereby encouraging empathic concern toward the victim.